Edit: Ich weiß immernoch nicht den Hersteller, noch das Modell. Könnte Eurolite sein, könnte Futurelight sein.
Bauart ist sehr ähnlich einem NJD Datamoon.
Ich habe jedoch schon alle möglichen Eurolite Goboflower, Racer MK1 , Racer MK2, Racer Mk3 etc in der Hand gehabt, keine war wie die hier – falls jemand das Modell erkennt, bitte Nachricht an mich, oder hier was posten.
Diesen Effekt bekam ich quasi geschenkt, jedoch mit dem kleinen Nachteil, dass eine druchgebrannte CPU drin war. Da es eh keine Teile mehr gibt und ich auch weder Hersteller noch das Model erkenne, musste ich wohl oder übel die Firmware von Grund auf neu machen. Anstelle des 89C51 von Atmel hatte ich einen STC89C52RC hier liegen. Gesamte Zeit bis der Code ging, ca 16 Stunden.
Jetzt strahlt Sie wieder, und hat 3 Kanäle, der Dritte ist für die Lampe an und aus, sowie zum auswählen von einem der drei Autoprogramme die Sie jetzt hat.
Die Flower besitzt nun einen Gobo-Shake, Rainboweffekt und einen Strobo-Effekt. Ausserdem schaltet der Effekt extrem kurz zwischen den einzelnen Gobos hin und her. Schneller als bei vergleichbaren Flowern mit solchen Steppern. Schneller als die mit AC-Motoren allemal…
Ein anderer riesen Vorteil ist die Cooldown-Funktion für die Lampe, so kann die Lampe abschalten während der Lüfter noch läuft.
Vorhang auf für die modded Goboflower von Eurolite/Futurelight/oder sonst eine. Firmware Version 1.5 ![]()
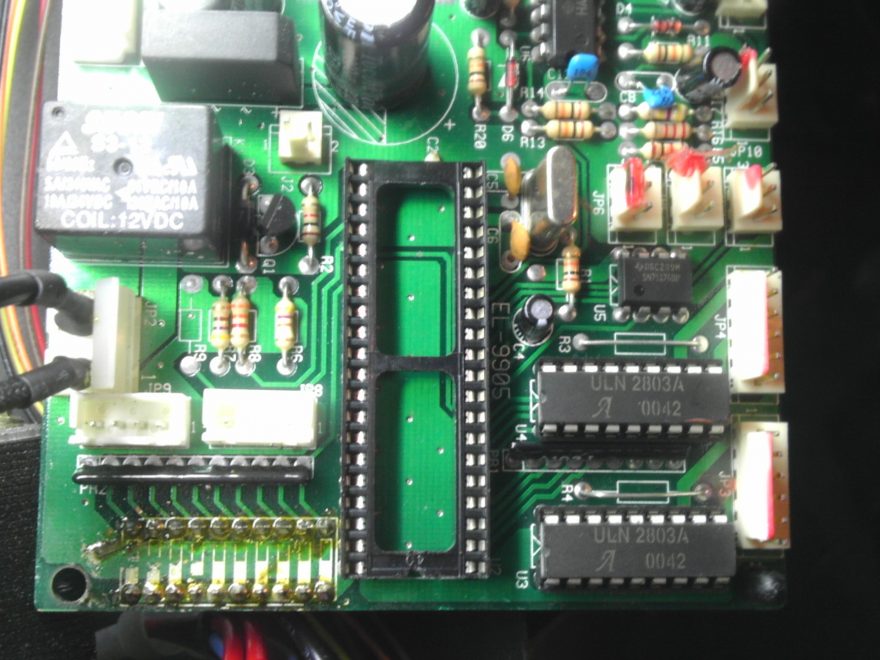
Hier Bilder der Platine:
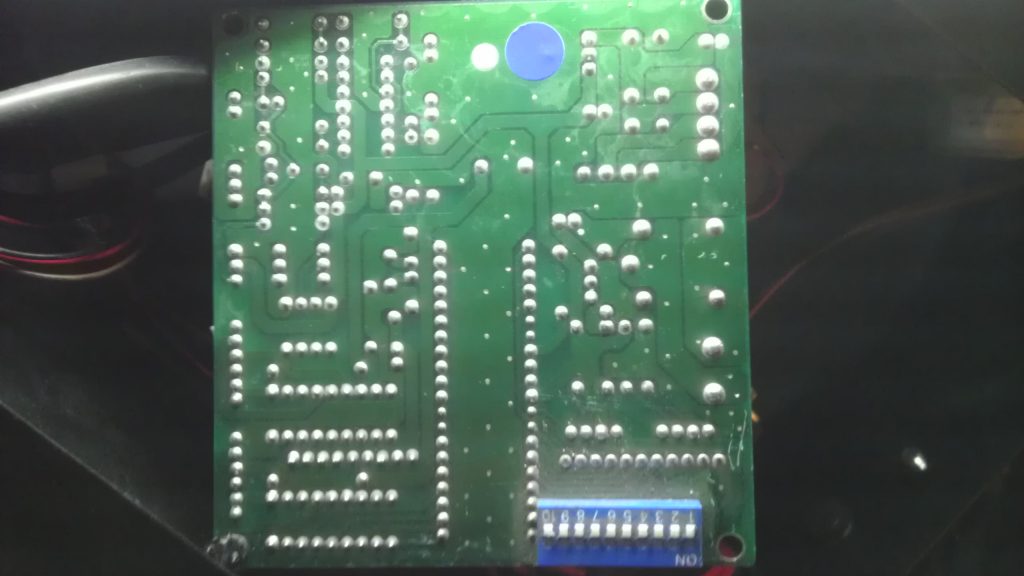
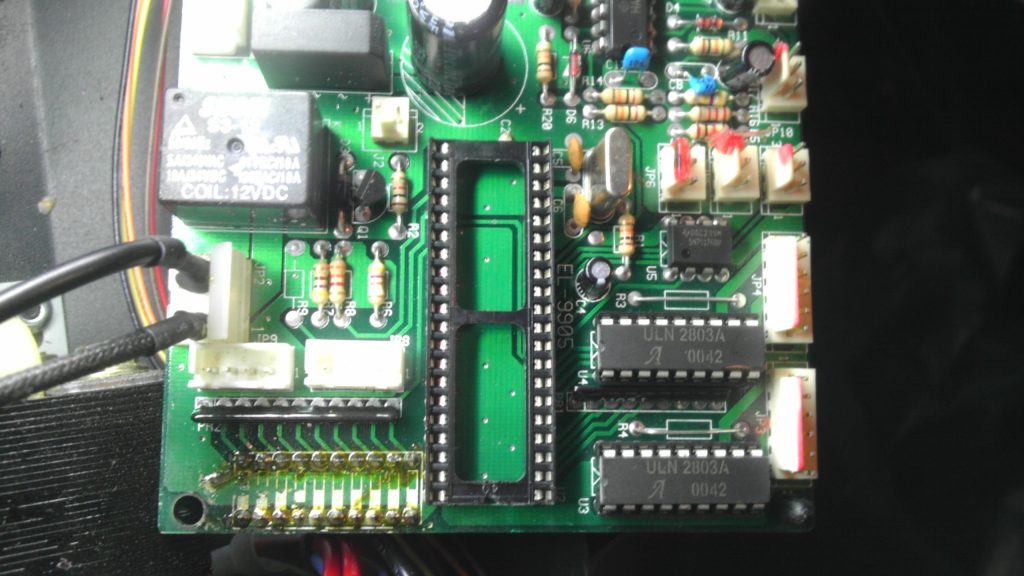
Hier ist der Header und die Pinbelegung der Platine nach Reverse Engineering.
#define MOTOR_PORT P1
//Flowerrad
sbit motorPin1 = MOTOR_PORT^0 ;
sbit motorPin2 = MOTOR_PORT^1 ;
sbit motorPin3 = MOTOR_PORT^2 ;
sbit motorPin4 = MOTOR_PORT^3 ;
//goborad
sbit goboPin1 = MOTOR_PORT^4 ;
sbit goboPin2 = MOTOR_PORT^5 ;
sbit goboPin3 = MOTOR_PORT^6 ;
sbit goboPin4 = MOTOR_PORT^7 ;
//Lampe
sbit lampe = P2^7 ;
//Dipschalter
sbit dip1 = P0^0;
sbit dip2 = P0^1;
sbit dip3 = P0^2;
sbit dip4 = P0^3;
sbit dip5 = P0^4;
sbit dip6 = P0^5;
sbit dip7 = P0^6;
sbit dip8 = P0^7;
sbit dip9 = P2^0;
sbit dip10 = P2^1; // ALL DIPS OK !
//Microfon
sbit mic = P3^4; //Mic in // Mic an == 1 // Mic aus == 0
Nachteile
in der Software habe ich keinen automatischen Blackout mehr, sowie das Senden im Master/Slavemode fehlt. Den programmiere ich erst sollte ich ein 2. Gerät bekommen.
DER//CODE
Falls jemand eine hat und auch keinen Chip mehr dafür bekommt, hier der Code, müsste evtl mit leichten Modifikationen auch für andere Flowers gehen.
/*
Eurolite Goboflower Firmware
Final Version 1.5 // 09.03.2015
(c) 2015 André Thomas
This Software may not be copied !
This Software must stay how it is !
Credit me , if you use it !
Made for Eurolite Goboflower with 10 Dichros + open,
2 Steppers, Mirrorplate Ports P1.0 - P1.3 , Gobowheel P1.4-P1.8
Use a 8052 Cpu with 6/T !
Code will not work on a 8051 CPU or a CPU with 12/T
Program Size: data=51.4 xdata=0 code=1518
*/
// Includes
#include <REG52.h>
#include <stdlib.h>
// defines
#define MOTOR_PORT P1
#define TAKT 15000
#define CHANNELS 3
#define MIC_DEBOUNCE 50
//Flowerrad
sbit motorPin1 = MOTOR_PORT^0 ;
sbit motorPin2 = MOTOR_PORT^1 ;
sbit motorPin3 = MOTOR_PORT^2 ;
sbit motorPin4 = MOTOR_PORT^3 ;
//goborad
sbit goboPin1 = MOTOR_PORT^4 ;
sbit goboPin2 = MOTOR_PORT^5 ;
sbit goboPin3 = MOTOR_PORT^6 ;
sbit goboPin4 = MOTOR_PORT^7 ;
//Lampe
sbit lampe = P2^7 ;
//Dipschalter
sbit dip1 = P0^0;
sbit dip2 = P0^1;
sbit dip3 = P0^2;
sbit dip4 = P0^3;
sbit dip5 = P0^4;
sbit dip6 = P0^5;
sbit dip7 = P0^6;
sbit dip8 = P0^7;
sbit dip9 = P2^0;
sbit dip10 = P2^1; // ALL DIPS OK !
//Microfon
sbit mic = P3^4; //Mic in // Mic an == 1 // Mic aus == 0
//DMX
sbit RxD = P3^0; // Recieve Data Port
sbit TxD = P3^1; // Transmit Data Port
sbit p32 = P3^2; // an aus für senden empfangen
bit dmxRx = 0;
//DMX EMPFANG
static unsigned char data dmx_data [3] ; // Array mit Werten der kanäle
volatile unsigned int addr ; // DMX Adresse
enum {IDLE, BREAK, STARTB, STARTADR}; //DMX states
volatile char gDmxState;
//Motor Sequenz
volatile unsigned char code motor_step[8] = {0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09} ;
volatile unsigned char code motor_speeds[12] = {0,1,2,3,4,5,10,13,16,20,25,30} ;
volatile unsigned char code gobos [12] = {0,9,17,25,33,41,49,57,65,73,81,90} ;
//Motoren
volatile char data m1_current_step = 0 ;
volatile char data m2_current_step = 0 ;
volatile char data m2_pos = 0;
volatile char data m2_dir = 1;
volatile char data m1_dir = 1;
volatile char data gobo_shaker_dir = 1;
//Main
unsigned char data gobo = 0;
unsigned char data gobo_goto = 0;
volatile unsigned char data step = 0 ;
volatile unsigned char data speed = 12;
volatile unsigned char data counterStep = 0;
//Zähler
char c1;
unsigned char mic_debounce = 1;
//Autoprg
volatile unsigned char dmx_ch1;
volatile unsigned char dmx_ch2;
unsigned char randomRepeats ;
unsigned char beat;
unsigned char autospeeds [9] = {125,0,255,125,15,245,125} ;
//Strobo-Effekt
volatile char gotopos;
volatile char strobe_speed = 116;
volatile bit strobe_go = 0;
volatile bit strobe_dir = 0 ;
//Rainbow Effekt
volatile bit rainbow_dir = 0 ;
volatile int rainbow_speed ;
/*-------------------------------------------------
Interrupts
-------------------------------------------------*/
// Timer 0 als Taktgeber für Motoren
void timer0_ISR (void) interrupt 1
{
TH0 = (65536 - TAKT + 6)/256; // Upper Byte
TL0 = (65536 - TAKT + 6)%256; // Lower Byte
step = 1;
}
// *************** DMX Reception ISR ****************
// von hoelscher-hi.de
void serial0 (void) interrupt 4
{
static unsigned int DmxCount;
unsigned char DmxByte = SBUF; //get data
unsigned char DmxState = gDmxState; //just load once from SRAM to increase speed
RI = 0; //Setze Recieve Interrupt zurück
if(RB8==1) {
if (DmxState == BREAK)
{
if (DmxByte == 0x00) gDmxState= STARTB; //normal start code detected
else gDmxState= IDLE;
}
else if (DmxState == STARTB)
{
if (--DmxCount == 0) //start address reached?
{
ET0 = 0;
DmxCount = 1; //set up counter for required channels
dmx_data[0] = DmxByte; //get 1st DMX channel of device
gDmxState = STARTADR;
}
}
else if (DmxState == STARTADR)
{
dmx_data[DmxCount++]= DmxByte; //get channel
if (DmxCount >= CHANNELS ) //all ch received?
{
gDmxState = IDLE; //wait for next break
ET0 = 1;
}
}
} else{
DmxCount = addr; //reset channel counter (count channels before start address)
gDmxState = BREAK;
}
}
// *********** Functions *************
//Starte DMX Empfänger
void dmxRxStart(void) {
PCON = 0x00; // 0x80 = doublespeed
SCON = 0x98; // Serial Port Mode 2 10011000
IE |= 0x90; // Enable RX I
dmxRx = 1; // Starte Empfang
}
// Motor 1
void m1_move_8 (char direction) {
if(m1_current_step == -1 ) {m1_current_step = 7;}
if(m1_current_step == 8 ) {m1_current_step = 0;}
MOTOR_PORT &= ~0x0F ; // maske
MOTOR_PORT |= motor_step[m1_current_step] ;
m1_current_step += direction;
}
// Motor 2
void m2_move (char direction) {
if(m2_current_step == -1 ) {m2_current_step = 7;}
if(m2_current_step == 8 ) {m2_current_step = 0;}
MOTOR_PORT &= ~0xF0 ; // maske
MOTOR_PORT |= motor_step[m2_current_step] << 4 ;
m2_current_step += direction;
}
//Motor 2 gehe zu Farbe
void m2_goto (unsigned char pos) {
if(pos == m2_pos) {return;}
if(pos < m2_pos ) {
m2_move(1);
m2_pos -- ;
}
if(pos > m2_pos) {
m2_move(-1);
m2_pos ++ ;
}
}
void m2_gobo_shaker (unsigned char pos, unsigned char intens) {
char i = pos + (intens*gobo_shaker_dir);
if(m2_pos == pos + intens ) {
gobo_shaker_dir = -1 ;
}
if(m2_pos == pos - intens ) {
gobo_shaker_dir = 1 ;
}
m2_goto (i);
}
void m2_gobo_strobe (void) {
if (strobe_dir == 1) {
if (m2_pos == 0) {
gotopos = 9 ;
strobe_dir = 0;
strobe_go = 1;
}
}else{
if (m2_pos >= 9) {
gotopos = 0 ;
strobe_dir = 1;
strobe_go = 1;
}else if (m2_pos == 0) {
strobe_dir = 1 ;
}
}
if(m2_pos>9) {
gotopos=0;
strobe_dir=1;
}
m2_goto(gotopos);
}
void m2_rainbow (void) {
if (rainbow_dir == 1) {
if (m2_pos == 9) {
gotopos = 90 ;
rainbow_dir = 0;
}
}else{
if (m2_pos == 90) {
gotopos = 9 ;
rainbow_dir = 1;
}
}
if(m2_pos>90 || m2_pos<9) {
gotopos=9;
rainbow_speed = 0;
rainbow_dir = 1;
}
m2_goto(gotopos);
}
//Delay
void delay (unsigned int n) {
unsigned int c = 0;
for(c=0;c<n;c++) {
TMOD =0x01;
TL0 = 0xCC;
TH0 = 0xFA;
TR0 = 1;
while(!TF0);
TR0 = 0;
TF0 = 0;
}
}
void main(void) {
/*INIT*/
mic = 1; // Schalte mic auf input
lampe = 0; // Lampe aus
//reset Goborad
for (c1=0;c1<96;c1++) {
m2_move (1);
delay(33);
}
m2_pos = 0;
m2_current_step = 0;
//reset Goborad ende
//Setze timer 0 - Taktgeber
EA=0;
TMOD = (TMOD & 0x0F) | 0x11; // Setzte T/C0 Mode
TH0 = (65536 - TAKT + 6)/256; // Upper Byte
TL0 = (65536 - TAKT + 6)%256; // Lower Byte
ET0 = 1; // Starte Timer 0 Interrupts
TR0 = 1; // Starte Timer 0
EA = 1; // Global Interrupt Enable
IP = 0x02; // Interrupt Priorität auf Timer 0 0x02 // auf serial 0x10
//Starte DMX Empfang wenn nocht nicht gestartet
if( dmxRx == 0 ) {
dmxRxStart();
ES = 1;
}
/*SUPERLOOP*/
for(;;) {
//Goborad
if(step==1) {
//check addresse
addr = P0 ;
if(dip9==1) {
addr += 256;
}
//Lampe == Channel 3
if(dmx_data[2]>20 || dip10 == 1 ) {
lampe = 1; // Lampe an
}
else{
lampe = 0; // Lampe aus
}
if ( dmx_data[2]>240 || dip10 == 1) {
// Automatisches Programm
if (mic == 1 && mic_debounce == 0) {
if (beat > randomRepeats) {
randomRepeats = (rand() % 3) + 1 ;
dmx_ch2 = autospeeds[(unsigned char) rand() % 9] ;
dmx_ch1 = (unsigned char) rand() % 255 ;
mic_debounce = MIC_DEBOUNCE ;
beat = 0 ;
}
beat++ ;
}
if( mic_debounce != 0 ) {
mic_debounce--;
}
}else if(dmx_data[2]>230){
// Automatik Programm 2
c1 = rand() % 4 ;
if (mic == 1 && mic_debounce == 0) {
if(c1 == 1) {
//rechtsrum schnell
dmx_ch2 = 0;
dmx_ch1 = rand() % 108;
if (dmx_ch1<9) dmx_ch1=9;
}else if (c1 == 2){
//linksrum schnell
dmx_ch2 = 255;
dmx_ch1 = rand() % 108;
if (dmx_ch1<9) dmx_ch1=9;
}else if (c1 == 3){
//Stillstand
dmx_ch2 = 125;
dmx_ch1 = (rand() % 108 ) + 108;
}else{
//Strobo
dmx_ch2 = 125;
dmx_ch1 = (rand() % 9)+108;
}
mic_debounce = MIC_DEBOUNCE ;
}
if( mic_debounce != 0 ) {
mic_debounce--;
}
}else if(dmx_data[2]>210){
//Autoprogramm 3 nur Spiegelrichtung
c1 = rand() % 2 ;
if (mic == 1 && mic_debounce == 0) {
if(c1 == 1) {
//rechtsrum schnell
dmx_ch2 = 0;
}else {
//linksrum schnell
dmx_ch2 = 255;
}
}
if( mic_debounce != 0 ) {
mic_debounce--;
}
dmx_ch1 = dmx_data[0];
}else{
dmx_ch1 = dmx_data[0];
dmx_ch2 = dmx_data[1];
}
// Goborad == channel 1
if (dmx_ch1 < 216) {
gobo_goto = (dmx_ch1 / 9) ;
gobo = gobos[gobo_goto%12];
if(gobo_goto < 12) {
m2_goto (gobo) ; }
else if ( gobo_goto >= 13 ) {
m2_gobo_shaker(gobo,(1)) ;
}
else if (gobo_goto == 12) {
//strobe me
if ( strobe_go == 0 ) {
m2_gobo_strobe();
}
if ((strobe_speed - dmx_ch1) <= 0) {
strobe_go = 0;
strobe_speed = 124;
}else{
strobe_speed -- ;
}
}
}else{
if ((rainbow_speed - dmx_ch1) <= 0) {
m2_rainbow () ;
rainbow_speed = 255 ;
}else{
rainbow_speed -- ;
}
}
// Spiegelrad
speed = dmx_ch2 / 10;
if (speed >= 13) {
m1_dir = 1 ;
speed = 25-speed;
}else{
m1_dir = -1 ;
}
if ( counterStep == 0 ) {
if(speed != 12){
m1_move_8 (m1_dir);
}
counterStep = motor_speeds[speed];
}
else{
counterStep--;
}
step=0;
}
}
}Technische Daten
Hersteller: ?
Model: ?
Jahr: ?
Motoren: Stepper Motoren für Gobo / Farbe und Spiegel.
Leuchtmittel: FCS150W / 24V
Visits: 1724
Mega!
Danke !